
Autoren/-innen
Hans-Peter Schwarz
Daniel Hege


Streifenpflegegeräte, 15.09.2016
GPS-GESTÜTZTE BEIKRAUTREGULIERUNG IM FREILANDGEMÜSEBAU
Im Freilandgemüsebau sollen einerseits qualitativ hochwertige Produkte erzeugt werden, die frei von Pflanzenschutzmittelrückständen und unerwünschtem Beikrautbesatz sind, andererseits nehmen Indikationslücken bei Herbiziden zu oder die Mittel können unerwünschte Rückstände verursachen. Zunehmend werden daher mechanische Verfahren zur Beikrautregulierung verwendet. Diese sind jedoch sehr zeitaufwendig und somit kostenintensiv. Ob die moderne GPS-Technologie die mechanische Beikrautregulierung unterstützen und optimieren kann, sollte in einer Masterthesis an der Hochschule Geisenheim geklärt werden. Die praktischen Untersuchungen führten zu dem Ergebnis, dass die Beikrautregulierung mittels GPS-Steuerung der Maschinen und Geräte nicht nur schneller, sondern auch kostengünstiger und präziser durchgeführt werden kann.
Die Regulierung von Beikräutern stellt vor allem im Gemüsebau eine große Herausforderung dar. Selbst wenige Segetalpflanzen werden vor allem bei Blattgemüsearten nicht toleriert. Ist der Besatz höher, können Mindererträge von bis zu 60 % die Folge sein [1]. Doch nicht nur die Regulierung der Beikräuter entscheidet über den Erfolg der Betriebe. Werden ineffiziente oder erfolglose Maßnahmen durchgeführt, so ist das letzte Mittel oft die Handjäte. Diese kann jedoch immense Lohnkosten verursachen. Die Spanne der Arbeitskraftstunden je Hektar kann dann von 40 bis teilweise über 500 Stunden reichen. Da mit jedem Zentimeter Abstand zur Kultur eine mechanisch unbearbeitete Fläche entsteht - dies entspricht dann etwa 10 zusätzlichen Arbeitskraftstunden je Hektar für die Handjäte -, wird versucht, besonders nah an die Reihen heran zu arbeiten.
Um diese hohe Präzision zu erreichen, entspricht zurzeit die Arbeitsbreite der Hacke der Sämaschinenbreite. In der Praxis wird daher bei der mechanischen Beikrautregulierung mit der Scharhacke jedes Beet einzeln abgefahren. Weiterhin führen die hohen Anforderungen an die Präzision dazu, dass die Fahrgeschwindigkeit mit 3 km/h oft unter der für die Geräte empfohlenen optimalen Arbeitsgeschwindigkeit von 6-9 km/h liegt [2]. Höhere Fahrgeschwindigkeiten würden zu einer unverhätnismäßig hohen Beanspruchung des Fahrers und eventuell größeren Schäden an der Kultur führen. Im Ergebnis können somit nur geringe Flächenleistungen von ca. 0,5 ha/h realisiert werden [3]. Um die Flächenleistung zu steigern, müsste die Vorfahrtsgeschwindigkeit erhöht werden. Ein Lösungsansatz ist, die Hackmaschine mit einer Reihensteuerung auszustatten.
Meist kommen hierbei optische Kamerasysteme zum Einsatz. Untersuchungen zeigen, dass sich damit die Vorfahrtsgeschwindigkeit auf bis zu 12 km/h steigern lässt [4]. Diese Systeme reagieren jedoch sehr sensibel auf Umwelteinflüsse. So können ein zu starker Beikrautbesatz, unterschiedliche Blattfärbungen wie bei Radicchio oder Reflexionen der Sonneneinstrahlung zu einer Fehlfunktion der Steuerung führen [5]. Weiterhin benötigen optische Kamerasysteme eine sichtbare Leitlinie zur Orientierung.
GPS-Steuerungen können sich dagegen unabhängig von sichtbaren Leitlinien und ungestört von den genannten Umwelteinflüssen orientieren. Sie sind somit auch für andere Arbeiten im Betrieb einsetzbar und amortisieren sich daher schneller. Ob und welche Möglichkeiten der Effizienzsteigerung sich bei der mechanischen Beikrautregulierung durch den Einsatz von GPS ergeben, sollte eine praktische Untersuchung im Frühjahr 2013 klären.
Für die Arbeit in den Reihenkulturen wurde ein RTK-Korrektursignal eingesetzt. Diese ermöglicht es auf + 2,5 cm genau zu arbeiten. Es wurde geprüft, ob durch diese Genauigkeit die Fahrgeschwindigkeit auf 9 km/h gesteigert werden kann, ohne die Arbeitsqualität der Regulierungsmaßnahme zu beeinträchtigen. Als Maßstab für die Qualität wurden sowohl die Kulturschäden (ganz entfernte Pflanzen) als auch der BKE (Bekämpfungserfolg) herangezogen. Der BKE drückt die Relation der Beikräuterblattfläche vor und nach der Regulierungsmaßnahme aus.
Zur Bestimmung der Blattfläche wurden mit einer Digitalkamera Bilder vor und zwei Tage nach dem Hacken gemacht. Die auszuwertende Fläche ist hierbei auf 0,25 m2 festgelegt. Um diese exakt abbilden zu können, wurde die Kamera auf einem Spezialstativ befestigt. Die Auswertung erfolgte mittels Bildanalyse am PC. Dabei wurde mit der Software WinDIAS die Beikrautblattfläche herausgefiltert. Die Kulturschäden wurden als Relation der geschädigten zu den intakten Kulturpflanzen beurteilt. Gleichzeitig sollte so nah wie möglich an der Reihe gearbeitet werden, um die notwendigen Arbeitsstunden für die Handjäte auf ein Minimum zu reduzieren. Der Abstand zur Reihe betrug in Speisezwiebeln 2,5 cm und in Spinat wegen der breiteren Wuchsform 3,5 cm.
Die randomisierten Versuchsflächen wurden jeweils gefräst und gesät. Aufgrund der kalten Witterung startete das Projekt mit drei Wochen Verspätung. Mitte April wurden dann zunächst die Geräte justiert und kalibriert. Um die Funktionsweise der Technik zu prüfen, wurde ein Vorversuch in bereits gewachsenem Winterspinat durchgeführt. Da die Bearbeitungsqualität hier bei einer Fahrgeschwindigkeit von bis zu 12 km/h - dem Vierfachen der praxisüblichen Fahrgeschwindigkeit - als äuserst positiv bewertet wurde, konnte auf eine weitere Einstellung der Geräte verzichtet werden.
Anfang Mai konnte mit den Hackarbeiten begonnen werden, das Zeitfenster zum optimalen Hacken betrug witterungsbedingt weniger als 12 Stunden, da nachfolgende Niederschläge drohten. Insgesamt mussten 0,5 ha bearbeitet werden, wobei jeder Variante eine Fläche von 282 m2 zugewiesen war.
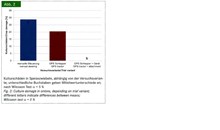
Dagegen wurden bei der Variante mit manueller Steuerung Schäden an der Kultur von durchschnittlich 28 % verursacht, was ökonomisch nicht tragbar ist. Die Erhöhung der Fahrgeschwindigkeit führte in beiden Kulturen zu keiner Verringerung des Bekämpfungserfolgs. Dieser lag in allen Varianten gleich schlecht bei ca. 50 %, da nachfolgende Niederschläge ein Wiederanwachsen der Beikräuter bedingten. Als Ergebnis kann deshalb festgehalten werden, dass die Fahrgeschwindigkeit in Verbindung mit einer GPS-gestützten Hackgerätesteuerung auf 9 km/h gesteigert werden kann. Allein diese Tatsache führt zu einer Steigerung der Flächenleistung von 0,5 auf 1,3 ha/h und somit zu einer besseren Nutzung der wertvollsten betrieblichen Ressource: den Arbeitskraftstunden. Diese sinken von 1,88 auf 0,76 Akh/ha.
Da die mechanische Beikrautregulierung mit der Scharhacke nur Teil eines ganzheitlichen Beikrautmanagementsystems ist, wurde im nächsten Schritt ein ökonomischer Vergleich zwischen dem praxisüblichen und einem GPS-optimierten System gezogen. Hierbei wurden mehrmalige Hackdurchgänge und andere Verfahren zur mechanischen Beikrautregulierung berücksichtigt.
In Spinat besteht das praxisübliche System aus 2 x Hacken. Mit der GPS-gestützten Technik und 6 m Arbeitsbreite können so 70 €/ha Verfahrenskosten gespart werden. Der Dieselverbrauch verringert sich um insgesamt 1 1/ha. Die Arbeitszeit kann um mehr als 3 Akh/ha gesenkt werden.
In Speisezwiebeln besteht das praxisübliche Verfahren aus 1 x Abflammen, 3 x Striegeln und 2 x Hacken. Das Abflammen macht knapp 50 % der Verfahrenskosten aus, da sehr viel Gas verbraucht wird. Bisher war es jedoch nicht möglich, Kulturen vor dem Auflaufen mit der Scharhacke zu bearbeiten, weshalb das breitflächige Abflammen die effizienteste Maßnahme war. Mit GPS ist es jedoch auch möglich, „blind" zu hacken und somit auch Beikräuter schon vor dem Auflaufen der Reihen zu regulieren. Denkbar ist es, den Gasverbrauch zu reduzieren, indem entweder nur in der Reihe abgeflammt wird oder ganz auf das Abflammen verzichtet wird. Somit wäre eine Kostensenkung um bis zu 170 €/ha möglich. Neben dem eingesparten Diesel kann auch Propangas als C02-Emittent eingespart werden.
Literatur
[1] Beck, M. (2009): Ökologischer Gemüseanbau - Handbuch für Beratung und Praxis. Hg. Eckhard George. Mainz, Bioland-Verlag, 2. Aufl.
[2] Laber, H. (1999): Effizienz mechanischer Unkrautregulationsmaßnahmen im Freilandgemüsebau. Dissertation, Universität Hannover, Fachbereich Gartenbau
[3] Weber, H. (1997): Geräte- und verfahrenstechnische Optimierung der mechanischen Unkrautregulierung in Beetkulturen. Freising, Inst, für Landtechnik, Forschungsbericht Agrartechnik des Arbeitskreises Forschung und Lehre der Max-Eyth-Gesellschaft Agrartechnik im VDI (VDI-MEG), Nr. 315
[4] Reicher, R. (2002): Bestandsorientierte automatische Nachführung
landwirtschaftlicher Arbeitsmaschinen in Reihenkulturen mit Hilfe der digitalen Bildverarbeitung. Dissertation, Justus-Liebig-Universität, Gießen
[5] Handler, F.; Nadlinger, M. (2005): Technische, arbeits- und betriebswirtschaftliche Aspekte der automatischen Lenkung von Hackgeräten. Projektbericht. HBLFA Francisco Josephinum BLT Biomass - Logistics -Technology, Wieselburg, Österreich
[6] KTBL (Hg.) (2010): Ökologischer Landbau - Daten für die Betriebsplanung. Darmstadt
Um diese hohe Präzision zu erreichen, entspricht zurzeit die Arbeitsbreite der Hacke der Sämaschinenbreite. In der Praxis wird daher bei der mechanischen Beikrautregulierung mit der Scharhacke jedes Beet einzeln abgefahren. Weiterhin führen die hohen Anforderungen an die Präzision dazu, dass die Fahrgeschwindigkeit mit 3 km/h oft unter der für die Geräte empfohlenen optimalen Arbeitsgeschwindigkeit von 6-9 km/h liegt [2]. Höhere Fahrgeschwindigkeiten würden zu einer unverhätnismäßig hohen Beanspruchung des Fahrers und eventuell größeren Schäden an der Kultur führen. Im Ergebnis können somit nur geringe Flächenleistungen von ca. 0,5 ha/h realisiert werden [3]. Um die Flächenleistung zu steigern, müsste die Vorfahrtsgeschwindigkeit erhöht werden. Ein Lösungsansatz ist, die Hackmaschine mit einer Reihensteuerung auszustatten.
Meist kommen hierbei optische Kamerasysteme zum Einsatz. Untersuchungen zeigen, dass sich damit die Vorfahrtsgeschwindigkeit auf bis zu 12 km/h steigern lässt [4]. Diese Systeme reagieren jedoch sehr sensibel auf Umwelteinflüsse. So können ein zu starker Beikrautbesatz, unterschiedliche Blattfärbungen wie bei Radicchio oder Reflexionen der Sonneneinstrahlung zu einer Fehlfunktion der Steuerung führen [5]. Weiterhin benötigen optische Kamerasysteme eine sichtbare Leitlinie zur Orientierung.
GPS-Steuerungen können sich dagegen unabhängig von sichtbaren Leitlinien und ungestört von den genannten Umwelteinflüssen orientieren. Sie sind somit auch für andere Arbeiten im Betrieb einsetzbar und amortisieren sich daher schneller. Ob und welche Möglichkeiten der Effizienzsteigerung sich bei der mechanischen Beikrautregulierung durch den Einsatz von GPS ergeben, sollte eine praktische Untersuchung im Frühjahr 2013 klären.
Versuchsaufbau
Ziel des Versuchs war es, die Vorfahrtsgeschwindigkeit während der mechanischen Beikrautregulierung schrittweise von 3 auf 9 km/h zu erhöhen. Hierzu wurden Flächen vom Lehr-und Versuchsbetrieb Queckbrunnerhof des DLR Rhein-Pfalz zur Verfügung gestellt. Diese wurden mit Speisezwiebeln und Spinat besät, da beide Kulturen besonders hohe Ansprüche an das Beikrautmanagement stellen. Die mechanische Beikrautregulierung wurde mit zwei Scharhacken durchgeführt, da diese den praxisüblichen Standard widerspiegeln. Als Referenz diente jeweils eine praxisübliche Variante mit einer Vorfahrtgeschwindigkeit von 3 km/h und manueller Steuerung des Schleppers. Dieser Variante wurden zwei weitere, GPS-gestützte Varianten gegenübergestellt. Bei Variante 1 folgte nur der Schlepper dem GPS-Signal. Hierzu war der McCormick C-Max 90 mit einem Autopiloten der Firma Trimble und einem DCM (Digital Communication Modem) ausgerüstet, um so das Signal eines RTK-Netzwerks (Real Time Kinematic) empfangen zu können. In Variante 2 erfolgte sowohl die Steuerung des Schleppers als auch die des Anbaugerätes über GPS. Um die vorhandene Hacktechnik GPS-fähig zu machen, wurde zwischen Schlepper und Gerät ein hydraulischer Verschieberahmen angebaut. Dieser Rahmen der Firma WiFO war zunächst für die Verschiebung von Anbaumähwerken entwickelt worden. Die Firma geo-konzept modifizierte den Rahmen dahingehend, dass das Gerät mittels eines weiteren GPS-Empfängers und eines zusätzlichen Lenkventils anhand der erhalten Korrekturdaten immer zur Beetmitte hin verschoben werden konnte (Abbildung 1). Die Ansteuerung erfolgt dabei aktiv, d. h. das Gerät lenkt selbst. Diese als TrueTracker bezeichnete Konfiguration ist nur in Verbindung mit einem Autopiloten möglich und gewährleistet höchste Präzision.Für die Arbeit in den Reihenkulturen wurde ein RTK-Korrektursignal eingesetzt. Diese ermöglicht es auf + 2,5 cm genau zu arbeiten. Es wurde geprüft, ob durch diese Genauigkeit die Fahrgeschwindigkeit auf 9 km/h gesteigert werden kann, ohne die Arbeitsqualität der Regulierungsmaßnahme zu beeinträchtigen. Als Maßstab für die Qualität wurden sowohl die Kulturschäden (ganz entfernte Pflanzen) als auch der BKE (Bekämpfungserfolg) herangezogen. Der BKE drückt die Relation der Beikräuterblattfläche vor und nach der Regulierungsmaßnahme aus.
Zur Bestimmung der Blattfläche wurden mit einer Digitalkamera Bilder vor und zwei Tage nach dem Hacken gemacht. Die auszuwertende Fläche ist hierbei auf 0,25 m2 festgelegt. Um diese exakt abbilden zu können, wurde die Kamera auf einem Spezialstativ befestigt. Die Auswertung erfolgte mittels Bildanalyse am PC. Dabei wurde mit der Software WinDIAS die Beikrautblattfläche herausgefiltert. Die Kulturschäden wurden als Relation der geschädigten zu den intakten Kulturpflanzen beurteilt. Gleichzeitig sollte so nah wie möglich an der Reihe gearbeitet werden, um die notwendigen Arbeitsstunden für die Handjäte auf ein Minimum zu reduzieren. Der Abstand zur Reihe betrug in Speisezwiebeln 2,5 cm und in Spinat wegen der breiteren Wuchsform 3,5 cm.
Die randomisierten Versuchsflächen wurden jeweils gefräst und gesät. Aufgrund der kalten Witterung startete das Projekt mit drei Wochen Verspätung. Mitte April wurden dann zunächst die Geräte justiert und kalibriert. Um die Funktionsweise der Technik zu prüfen, wurde ein Vorversuch in bereits gewachsenem Winterspinat durchgeführt. Da die Bearbeitungsqualität hier bei einer Fahrgeschwindigkeit von bis zu 12 km/h - dem Vierfachen der praxisüblichen Fahrgeschwindigkeit - als äuserst positiv bewertet wurde, konnte auf eine weitere Einstellung der Geräte verzichtet werden.
Anfang Mai konnte mit den Hackarbeiten begonnen werden, das Zeitfenster zum optimalen Hacken betrug witterungsbedingt weniger als 12 Stunden, da nachfolgende Niederschläge drohten. Insgesamt mussten 0,5 ha bearbeitet werden, wobei jeder Variante eine Fläche von 282 m2 zugewiesen war.
Auswertung der Ergebnisse
Die Auswertung der Ergebnisse bestätigte dann die positiven Eindrücke aus dem Vorversuch. So traten bei der Variante mit GPS-Steuerung des Schleppers und des Anbaugerätes in beiden Kulturen die geringsten bzw. keine Kulturschäden auf (Abbildung 2).Dagegen wurden bei der Variante mit manueller Steuerung Schäden an der Kultur von durchschnittlich 28 % verursacht, was ökonomisch nicht tragbar ist. Die Erhöhung der Fahrgeschwindigkeit führte in beiden Kulturen zu keiner Verringerung des Bekämpfungserfolgs. Dieser lag in allen Varianten gleich schlecht bei ca. 50 %, da nachfolgende Niederschläge ein Wiederanwachsen der Beikräuter bedingten. Als Ergebnis kann deshalb festgehalten werden, dass die Fahrgeschwindigkeit in Verbindung mit einer GPS-gestützten Hackgerätesteuerung auf 9 km/h gesteigert werden kann. Allein diese Tatsache führt zu einer Steigerung der Flächenleistung von 0,5 auf 1,3 ha/h und somit zu einer besseren Nutzung der wertvollsten betrieblichen Ressource: den Arbeitskraftstunden. Diese sinken von 1,88 auf 0,76 Akh/ha.
Weiterführende Berechnungen
Die Technik bietet jedoch noch mehr Potenzial. So ist es möglich, die Beete mit der im Betrieb vorhandenen Technik zu säen bzw. zu pflanzen und mit einem Vielfachen der Arbeitsbreite zu hacken, da jede einzelne Reihe auf ± 2,5 cm genau angelegt wird. So können beispielsweise 3 Beete mit einer Arbeitsbreite von 6 m gleichzeitig gehackt werden, wodurch sich die Flächenleistung nochmals auf knapp 4 ha/h steigern lässt. Mithilfe der KTBL-Datensammlung für den ökologischen Landbau [6] konnte ermittelt werden, dass sich der Dieselverbrauch von 4 auf 3,5 1/ha und folglich auch die C02-Emissionen pro Hektar verringern lassen. Ebenso verringert sich die Anzahl der Spuren auf ein Drittel, wodurch die Bodenverdichtung reduziert und das Bodenleben gefördert wird. Die Verfahrenskosten sinken von 60 auf ca. 25 €/ha (Tabelle 1).Da die mechanische Beikrautregulierung mit der Scharhacke nur Teil eines ganzheitlichen Beikrautmanagementsystems ist, wurde im nächsten Schritt ein ökonomischer Vergleich zwischen dem praxisüblichen und einem GPS-optimierten System gezogen. Hierbei wurden mehrmalige Hackdurchgänge und andere Verfahren zur mechanischen Beikrautregulierung berücksichtigt.
In Spinat besteht das praxisübliche System aus 2 x Hacken. Mit der GPS-gestützten Technik und 6 m Arbeitsbreite können so 70 €/ha Verfahrenskosten gespart werden. Der Dieselverbrauch verringert sich um insgesamt 1 1/ha. Die Arbeitszeit kann um mehr als 3 Akh/ha gesenkt werden.
In Speisezwiebeln besteht das praxisübliche Verfahren aus 1 x Abflammen, 3 x Striegeln und 2 x Hacken. Das Abflammen macht knapp 50 % der Verfahrenskosten aus, da sehr viel Gas verbraucht wird. Bisher war es jedoch nicht möglich, Kulturen vor dem Auflaufen mit der Scharhacke zu bearbeiten, weshalb das breitflächige Abflammen die effizienteste Maßnahme war. Mit GPS ist es jedoch auch möglich, „blind" zu hacken und somit auch Beikräuter schon vor dem Auflaufen der Reihen zu regulieren. Denkbar ist es, den Gasverbrauch zu reduzieren, indem entweder nur in der Reihe abgeflammt wird oder ganz auf das Abflammen verzichtet wird. Somit wäre eine Kostensenkung um bis zu 170 €/ha möglich. Neben dem eingesparten Diesel kann auch Propangas als C02-Emittent eingespart werden.
Schlussfolgerungen
Durch den Einsatz der GPS-gestützten Hacktechnik können die Verfahrenskosten um bis zu 60 % im Vergleich zum praxisüblichen Verfahren gesenkt werden. Außerdem können mit dieser Technik vorhandene Geräte und Anbausysteme weiter genutzt und Kosten minimiert werden. Weiterhin können Diesel und andere Betriebsmittel, wie z.B. Propangas beim Abflammen, gespart werden, was die C02-Bilanz verbessert. Durch die Möglichkeit über drei Beete hinweg zu arbeiten, lässt sich die Anzahl der Spuren reduzieren, wodurch Bodenverdichtungen minimiert und das Bodenleben gefördert werden. Durch eine größere Arbeitsbreite der Geräte lässt sich auch der Arbeitszeitbedarf je Hektar um bis zu 70 % reduzieren. Daher ist der Einsatz der mechanischen Beikrautregulierung mit GPS-Unterstützung gerade bei engem Zeitfenster sinnvoll. Schönwetter-Phasen können so effizienter genutzt werden - wie wichtig dieser Aspekt werden kann, zeigte das nasskalte Wetter im Frühjahr 2013.Literatur
[1] Beck, M. (2009): Ökologischer Gemüseanbau - Handbuch für Beratung und Praxis. Hg. Eckhard George. Mainz, Bioland-Verlag, 2. Aufl.
[2] Laber, H. (1999): Effizienz mechanischer Unkrautregulationsmaßnahmen im Freilandgemüsebau. Dissertation, Universität Hannover, Fachbereich Gartenbau
[3] Weber, H. (1997): Geräte- und verfahrenstechnische Optimierung der mechanischen Unkrautregulierung in Beetkulturen. Freising, Inst, für Landtechnik, Forschungsbericht Agrartechnik des Arbeitskreises Forschung und Lehre der Max-Eyth-Gesellschaft Agrartechnik im VDI (VDI-MEG), Nr. 315
[4] Reicher, R. (2002): Bestandsorientierte automatische Nachführung
landwirtschaftlicher Arbeitsmaschinen in Reihenkulturen mit Hilfe der digitalen Bildverarbeitung. Dissertation, Justus-Liebig-Universität, Gießen
[5] Handler, F.; Nadlinger, M. (2005): Technische, arbeits- und betriebswirtschaftliche Aspekte der automatischen Lenkung von Hackgeräten. Projektbericht. HBLFA Francisco Josephinum BLT Biomass - Logistics -Technology, Wieselburg, Österreich
[6] KTBL (Hg.) (2010): Ökologischer Landbau - Daten für die Betriebsplanung. Darmstadt
Medium

- Die Forschungsanstalt Geisenheim ist eine der ältesten Forschungseinrichtungen des Wein- und Gartenbaus im deutschsprachigen Raum.
- Im Rahmen einer engen Verknüpfung mit der Hochschule RheinMain werden in Geisenheim rund 1000 Studierende der Fachrichtungen Weinbau und Oenologie, Getränketechnologie, Gartenbau sowie Landschaftsarchitektur von den Mitarbeitern der Forschungsanstalt in Vorlesungen und Übungen mit betreut.
- Ziel unserer Arbeit ist es, innovative Forschungen in anwendbare Handlungsansätze für die Praxis umzusetzen und anzubieten, um deren Konkurrenzfähigkeit zu stärken. Die zukünftigen Diplomingenieure, Bachelors und Masters sollen sowohl national als auch international Leitungsfunktionen in den von uns vertretenen Industrien übernehmen können.



















